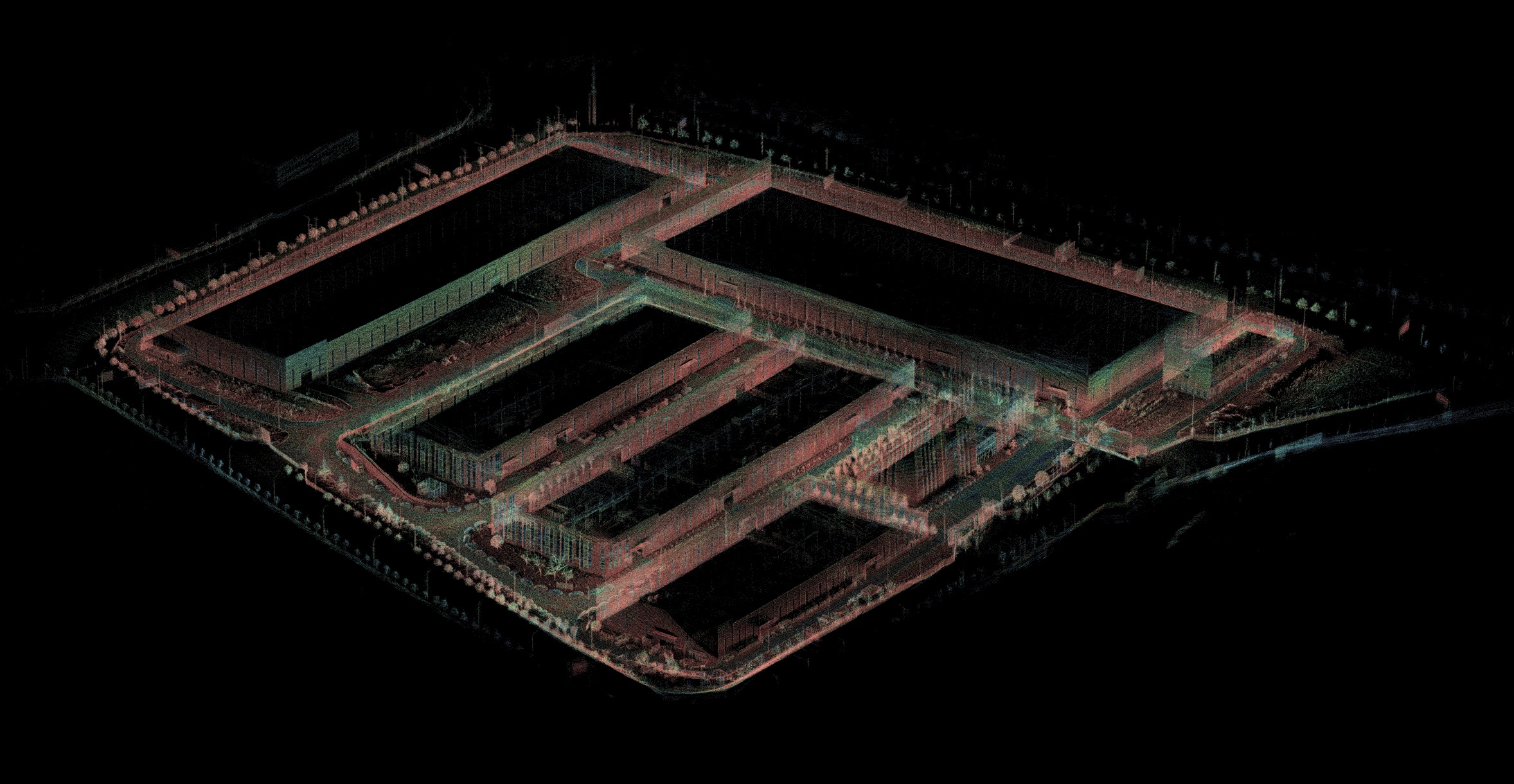
点云地图
数据采集前准备
- IPC网络连接正常;
- 四个雷达数据与IPC通讯正常;
- RTK登录,GNSS校准成功;
- 底盘can通讯正常。
启动自动驾驶系统
- 右上角点击PIX,然后点击RESET检查系统,显示脚本执行成功后点击RUN,等待自动驾驶启动,自动驾驶进度条
 - RVIZ启动成功,激光点云显示正常
- RVIZ启动成功,激光点云显示正常

- 检查以下话题数据
/sensing/lidar/concatenated/pointcloud_raw *观察字段是否显示完整*
/sensing/imu/imu_data
/sensing/gnss/fix
- 获取话题数据,检查数据是否正常,输出频率是否正常
- 融合点云数据输出正常,且输出频率为10Hz
- Imu数据正常,且输出频率为100Hz
- Fix数据正常,且输出频率为10Hz
ros2 topic echo /sensing/lidar/concatenated/pointcloud_raw
ros2 topic echo /sensing/imu/imu_data
ros2 topic echo /sensing/gnss/fix

ros2 topic hz /sensing/lidar/concatenated/pointcloud_raw
ros2 topic hz /sensing/imu/imu_data
ros2 topic hz /sensing/gnss/fix

注意:一定要按照要求进行检查,否者会导致建图失败。
开始录制话题数据
1. 数据录制
- 将车辆移动到需要运营自动驾驶的路线上
- 打开终端并执行以下命令
cd ~/pix/ros2bag
ros2 bag record /sensing/lidar/concatenated/pointcloud_raw /sensing/imu/imu_data /sensing/gnss/fix

- 根据运营路线进行数据采集,开启录制数据脚本后车辆在原地等待10秒左右等待imu数据收敛后开始运营车辆,红绿灯地方可以停止等待。数据采集过程车辆应匀速行使,且车速不得高于15km/h,转弯处速度不得高于8km/h,尽量避免突然加速;
- 录制数据过程一定要进行回环检测,避免imu无法收敛点云数据,导致建图失败。
2. 数据处理
- 数据录制完成后查看数据大小,如果超过2G请将数据进行分割,2G一个包;
- 数据分割完成后,请联系PIX工程师,将数据上传到PIX服务器进行建图;
- 大概1个工作日后PCD地图完成。